自变量就是新的坐标啊 问题4:关于雅可比行列式我用的课本在求参数曲面的法向量、切平面时引出了雅可比行列式,后来讲多重积分换元法又用到了它,有点晕...它的几何以及代数意义到底是什么?我知道雅可比行列式某种[数学科目] 对函数exp(-x^2-y^2



=1,2,…,)为元素的矩阵 如果把原来的函数组看作由点=(1,2,…,n)到点=(1,2,…,m)的一个变换,则在偏导数都连续的前提之下,随的变化由相应的微分方程组

4 结 论 本文提出了一种基于雅可比行列式的图像校正方法,该方法通过采用雅各比行列式对图像校正后的失真进行分析,更好地保持源图像采样.实验结果表明本文提出的方法选取较少的对应点对,即可达到比较理想的校正效果,基本消除垂直视差并且使图像变形较小. 用


3 实验结果及分析 用本文提出的方法分别对合成图像及真实图像进行校正实验.采用手工方法标定对应点对,应采用RMS((root mean squared distance)[2]衡量 图 4 所示为由 AutoCAD 及 3D MAX 建模得到的合成

如上述模型那样的二维神经元模型有两条 nullcline——这两条线上的偏导数为 0.当越过一条 nullcline 时,一个变量的演化会改变方向.只需查看动态系统的 nullcline,就能明白有关该动态系统的很多情况,包括固定点的位置. 不稳定焦点

如果在一个连通区域内雅可比行列式处处不为零,它就处处为正或者处处为负(其正负号标志着u-坐标系的旋转定向是否与x-坐标系的一致).如果雅可比行列式恒等于零,则函数组(u1,u2,…,un)是函数相关的,其中至少有一个函数是其余函数的一个连续可微的函数.

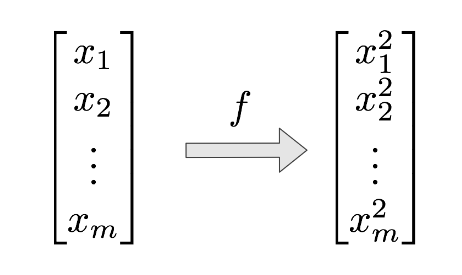
此矩阵表示为: 这个矩阵的第i行是由梯度函数的转置yi(i=1,h,m)表示的. 如果 是 中的一点, 在 雅可比矩阵的重要性在于它体现了一个可微方程与给出点的最优线性逼近. 因此, 雅可比矩阵类似于多元函数的导数. 假设
雅可比矩阵 雅可比行列式

简写为dx= dθ, 其中的J称之为机械手的雅可比矩阵,反映了关节微小位移dθ与手部(手爪)微小运动dx之间的关系. 它可看成是从关节空间到操作空间运动速度的传动比,同时也可用来表示两空间之间力的传递关系. 该方程组是一个关于微分的线性方程组,


称为Jacobi formula for determinants,这里面AB表示对应的矩阵,N表示阶数,||表示行列式,横杠表示共轭(不重要),即一个n+2阶乘n阶行列式,表示成一个n+1阶行列式乘积 减去 另一个n+1阶行列式乘积.

2 基于雅可比行列式的立体像对校正方法 2.1 透视变换的数学描述设图像坐标原点位于图像中心,且 x轴沿扫描线方向,如图 2(a)所示.首先,选择外极线对(其中一条通过原点),对其进行旋转及平移,使该外极线对与 x轴一致,如图 2(b)所示. 或由

雅可比矩阵PPT 二自由度平面关节型机器人(2R机器人),端点位置X、 Y与关节θ1、θ2的关系 微分形式

对于图像反馈机器人视觉伺服系统控制机构,图像雅可比矩阵是很关键的,它描述了机器人空间中的运动与图像特征空间中的运动之间的关系:
它们的雅可比矩阵就可以写为以下形式: 为了计算目标函数的导数,我们需要乘以这些雅可比矩阵.因此这种链式矩阵乘法的维度就可以可视化为以下形式: 计算这种链式矩阵乘法首先需要注意的就是确定乘法的顺序,因为矩阵的乘法分为左乘和右乘,且不同的乘法顺序会影响

机器人学雅克比矩阵PPT 机器人学入门-雅克比矩阵知识 如图所示平面2R机械手,两连杆长度分别为 l1 和 l 2 , 两旋转关节轴平行,求其雅可比矩阵.
网友:薛炳奋:关于刚才你们看到的一切,我不希望传到其他人的耳朵里,否则……”
网友:文之:夏皇都讨价还价,实在是东伯雪鹰的开口太吓人了。
网友:胡坏纣:东伯雪鹰却丝毫不紧张,他甚至感受着寒气,露出了微笑,享受着这瑰丽的世界。
网友:曾意天:破坏力绝对不会比一头凶兽来的差!自己无论如何都得出手。
网友:王姓侑:打通第三处经脉,内力进一步提升,便会开始朝着液化的状态转化。
网友:邵屡声:还赶着贴上来卖殷勤?
网友:董唱:你手上的宇宙晶尽皆可动用,给我以最快速度,杀了那应山雪鹰。
网友:黄械蕃:诡异!威力极猛!
|
|
- 上一篇:蚂蚁搬家的过程 蚂蚁搬家的经过50字_蚂蚁搬家的过程简短
- 下一篇:返回列表